
產(chǎn)品簡介PRODUCT DESCRIPTION

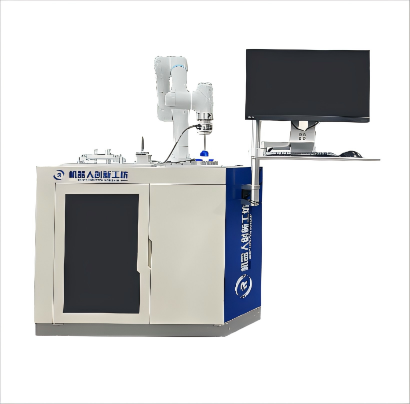
雙臂協(xié)作機器人開發(fā)平臺
聯(lián)系電話:13720126958 / 13387619634雙臂協(xié)作機器人開發(fā)平臺,主要由兩臺六軸協(xié)作機器人、電動手爪、2D或3D視覺系統(tǒng)、主控電腦和實訓(xùn)機臺等組成,并可以選配六維力傳感器或人機語音組件等。可以通過運動規(guī)劃、干涉區(qū)域設(shè)置以及傳感器控制用于仿人臂智能協(xié)作控制實驗;也可以通過雙臂運動規(guī)劃和力反饋完成復(fù)雜程度高的協(xié)作裝配或加工;還可以用于基于機器學(xué)習(xí)能力的雙臂機器人任務(wù)等,通過意圖編程模式替代動作過程編程方式。機器人本體、手爪、視覺、交互方式、場景均可以根據(jù)用戶需要定制。
主要展示內(nèi)容:
1,產(chǎn)品識別(顏色、圖案、輪廓(2D或3D))
2,雙協(xié)作機器人協(xié)同控制
3,雙臂協(xié)作七巧板拼圖
4,雙臂協(xié)作三階魔方還原
5,雙臂協(xié)作螺絲&螺母裝配
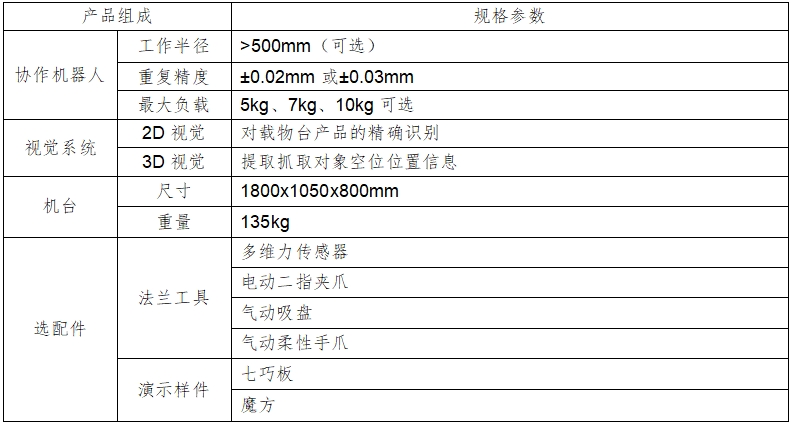
備注:機器人品牌、臂展、負載和功能模塊均可以根據(jù)用戶需要選擇。
相關(guān)產(chǎn)品推薦RELATED PRODUCTS




客戶服務(wù)電話:
027-87018711
 掃描二維碼關(guān)注我們
掃描二維碼關(guān)注我們
聯(lián)系電話:李經(jīng)理 13720126958 陳經(jīng)理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術(shù)開發(fā)區(qū)關(guān)東街道湯遜湖北路36號武漢理工大科技園新能源研發(fā)基地2棟08層801
版權(quán)所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1